Classe PID.
Mais...
#include <pid.h>
|
| bool | checkUpLim |
| |
| bool | checkLowLim |
| | Membro que define se o PID chegou ao limite superior. Mais...
|
| |
| UsedType | Step |
| | Membro que define se o PID chegou ao limite inferior. Mais...
|
| |
| UsedType | Error |
| | Membro onde &ecute armazenado a varia��o do tempo, o passo da funç&aatildee. Mais...
|
| |
| UsedType | pastError |
| | Membro onde &ecute armazenado o erro a medida que o PID &eecute executado. Mais...
|
| |
| UsedType | integralError |
| | Membro onde &ecute armazenado o erro anterior para comparações. Mais...
|
| |
| UsedType | derivativeError |
| | Membro onde &ecute armazenado o erro da integral num&ecuterica. Mais...
|
| |
| UsedType | kp |
| | Membro onde &ecute armazenado o erro da derivada num&ecuterica. Mais...
|
| |
| UsedType | ki |
| | Membro onde &ecute armazenado o paramêto KP do PID. Mais...
|
| |
| UsedType | kd |
| | Membro onde &ecute armazenado o paramêto KI do PID. Mais...
|
| |
| UsedType | upperLimit |
| | Membro onde &ecute armazenado o paramêto KD do PID. Mais...
|
| |
| UsedType | lowerLimit |
| | Membro onde &ecute definido o limite superior do PID. Mais...
|
| |
| UsedType | PIDout |
| | Membro onde &ecute definido o limite superior do PID. Mais...
|
| |
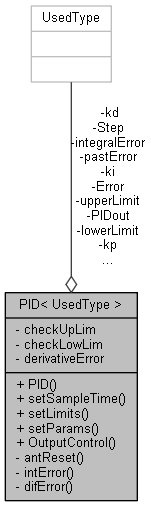
template<typename UsedType>
class PID< UsedType >
Classe PID.
Classe PID criada com o objetivo de simular um controle PID.
Definição na linha 13 do arquivo pid.h.
template<typename UsedType >
Construtor padrão da classe.
Inicia todos os membros em 0 para evitar o uso indevido de lixo da mem&ocuteria.
template<typename UsedType >
| void PID< UsedType >::antReset |
( |
| ) |
|
|
private |
Membro onde &ecute armazenada a sa&icute do PID.
M&ecutetodo privado antReset().
Verifica se o controle PID chegou a um dos limites definidos.
template<typename UsedType >
| void PID< UsedType >::difError |
( |
| ) |
|
|
private |
M&etodo privado difError().
C´lcula o erro da derivada usada no PID.
template<typename UsedType >
| void PID< UsedType >::intError |
( |
| ) |
|
|
private |
M&ecutetodo privado intError().
C´lcula o erro integral usado no PID.
template<typename UsedType >
| UsedType PID< UsedType >::OutputControl |
( |
UsedType |
Reference, |
|
|
UsedType |
SignalInput |
|
) |
| |
M&ecutetodo o qual c´ a sa&icuteda do PID.
Recebe a referência e o sinal de entrada, para então calcular o erro e gerar o sinal de sa&icuteda do PID.
- Parâmetros
-
| Reference | &Ecute o setpoint do sistema, ou seja, o valor que o PID ir´ guiar o sistema. |
| SignalInput | &Ecute o sinal de entrada do sistema. |
template<typename UsedType >
| void PID< UsedType >::setLimits |
( |
UsedType |
upperLimit, |
|
|
UsedType |
lowerLimit |
|
) |
| |
M&ecutetodo o qual define os limites.
Toma como paramêtos o limite superior e o limite inferior no qual a faixa do PID deve trabalhar.
- Parâmetros
-
| upperLimit | &Ecute o limite superior do sistema a ser definido. |
| lowerLimit | &Ecute o limite inferior do sistema a ser definido. |
template<typename UsedType >
| void PID< UsedType >::setParams |
( |
UsedType |
kp, |
|
|
UsedType |
ki, |
|
|
UsedType |
kd |
|
) |
| |
M&ecute o qual define os paramêtos kp, ki, e kd respectivamente do sistema a ser controlado.
Recebe os paramêtos kp, ki e kd do sistema.
- Parâmetros
-
| kp | &Ecute o ganho proporcional, este ganho resultada em grandes mudança na sa&icuteda dado um determinado erro. Altos valores pode tornar o sistema inst´vel. |
| ki | &Ecute o ganho integral, ele &ecute proporcional ao erro e a duraç´ do mesmo. O ganho integral acelera a sa&icute do sistema at&ecute o setpoint. |
| kd | &Ecute o ganho derivado, este ganho prevê o comportamento do sistema, sendo assim, ele melhora a estabilidade do sistema. |
template<typename UsedType >
| void PID< UsedType >::setSampleTime |
( |
UsedType |
Time | ) |
|
M&ecutetodo o qual define o passo.
Toma como paramêto o tempo de amostrogram e armazena em Step.
- Parâmetros
-
| Time | Variação de tempo do sistema. |
template<typename UsedType >
| bool PID< UsedType >::checkLowLim |
|
private |
Membro que define se o PID chegou ao limite superior.
Definição na linha 18 do arquivo pid.h.
template<typename UsedType >
| bool PID< UsedType >::checkUpLim |
|
private |
Definição na linha 17 do arquivo pid.h.
template<typename UsedType >
| UsedType PID< UsedType >::derivativeError |
|
private |
Membro onde &ecute armazenado o erro da integral num&ecuterica.
Definição na linha 24 do arquivo pid.h.
template<typename UsedType >
| UsedType PID< UsedType >::Error |
|
private |
Membro onde &ecute armazenado a varia��o do tempo, o passo da funç&aatildee.
Definição na linha 21 do arquivo pid.h.
template<typename UsedType >
| UsedType PID< UsedType >::integralError |
|
private |
Membro onde &ecute armazenado o erro anterior para comparações.
Definição na linha 23 do arquivo pid.h.
template<typename UsedType >
| UsedType PID< UsedType >::kd |
|
private |
Membro onde &ecute armazenado o paramêto KI do PID.
Definição na linha 28 do arquivo pid.h.
template<typename UsedType >
| UsedType PID< UsedType >::ki |
|
private |
Membro onde &ecute armazenado o paramêto KP do PID.
Definição na linha 27 do arquivo pid.h.
template<typename UsedType >
| UsedType PID< UsedType >::kp |
|
private |
Membro onde &ecute armazenado o erro da derivada num&ecuterica.
Definição na linha 26 do arquivo pid.h.
template<typename UsedType >
| UsedType PID< UsedType >::lowerLimit |
|
private |
Membro onde &ecute definido o limite superior do PID.
Definição na linha 31 do arquivo pid.h.
template<typename UsedType >
| UsedType PID< UsedType >::pastError |
|
private |
Membro onde &ecute armazenado o erro a medida que o PID &eecute executado.
Definição na linha 22 do arquivo pid.h.
template<typename UsedType >
| UsedType PID< UsedType >::PIDout |
|
private |
Membro onde &ecute definido o limite superior do PID.
Definição na linha 33 do arquivo pid.h.
template<typename UsedType >
| UsedType PID< UsedType >::Step |
|
private |
Membro que define se o PID chegou ao limite inferior.
Definição na linha 20 do arquivo pid.h.
template<typename UsedType >
| UsedType PID< UsedType >::upperLimit |
|
private |
Membro onde &ecute armazenado o paramêto KD do PID.
Definição na linha 30 do arquivo pid.h.
A documentação para esta classe foi gerada a partir do seguinte arquivo:
- SistemasdeControle/src/optimizationLibs/pid.h
 1.8.9
1.8.9

